
1 引言
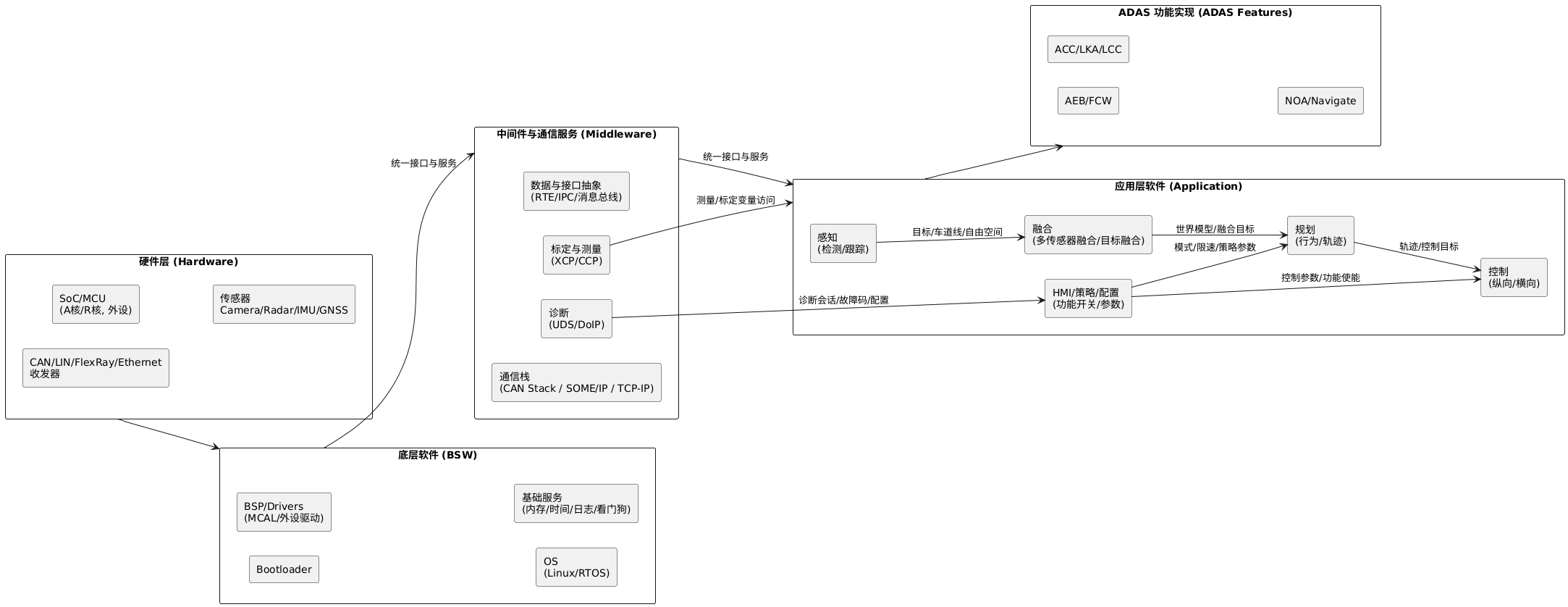
在高级驾驶辅助系统(ADAS, Advanced Driver Assistance System)中,软件架构通常采用分层设计。系统可以大体分为 底层软件(Basic Software) 与 应用层软件(Application Layer) 两部分。
底层软件负责硬件管理与系统支撑,应用层软件则承担核心功能与算法实现。两者通过标准化接口协同工作,共同构成智能驾驶功能的技术基础。
2 底层软件(BSW)
2.1 概述
底层软件是ADAS系统运行的基石,直接与硬件打交道。它提供统一的运行环境和接口抽象,使上层功能模块能够独立于硬件实现。其目标是屏蔽硬件差异、提升系统稳定性与可移植性。
2.2 主要组成
2.2.1 操作系统(Operating System, OS)
操作系统负责系统资源管理和任务调度,包括任务优先级、内存分配、进程通信以及中断响应等。
在ADAS系统中,操作系统通常具备实时性(Real-time)特征,确保各功能任务按严格时序执行。常用实现包括AUTOSAR OS、QNX等。
2.2.2 设备驱动程序(Device Driver)
设备驱动程序是底层软件与硬件之间的桥梁,用于控制和管理传感器、执行器等设备。
它将硬件寄存器和通信细节封装为标准接口,使上层应用能够方便地访问硬件资源,而无需了解具体实现。
2.2.3 基础服务(Basic Services)
基础服务模块为上层功能提供通用系统能力,如通信管理、时间同步、诊断、日志与错误处理等。
这些服务通常由中间件或AUTOSAR基础软件(BSW)组件实现,是保证系统一致性与可靠性的关键。
2.3 功能作用
底层软件在ADAS系统中相当于“地基”,支撑整个软件架构的运行。
它为上层算法提供稳定的计算与通信环境,并通过接口标准化实现软硬件解耦,使系统能在不同平台上灵活迁移与复用。
2.4 类比说明
底层软件在ADAS系统中,就像智能手机中的操作系统和驱动程序。
当用户在手机上拍照时,摄影App只需调用系统提供的“拍照接口”,而不需要关心镜头焦距如何调节、感光元件如何采样、图像信号如何转换。这些复杂的底层工作,都是由操作系统和驱动在后台完成的。
同理,在ADAS系统中,应用层算法(比如感知、决策、控制)只需调用底层软件提供的统一接口,就能读取传感器数据或控制执行器,而不用去理解每个传感器的通信协议或硬件细节。
这样一来,底层软件就像手机系统的“隐形后台”,保证各种硬件稳定工作;而应用层就像各种App,在这个统一环境中自由创新、快速迭代。两者的分工让ADAS软件既高效又灵活,既能稳定运行,又能持续演进。
3 应用层软件(ASW)
3.1 概述
应用层软件是ADAS系统中实现具体驾驶辅助功能的核心部分,直接决定车辆的感知能力与控制行为。
它利用底层软件提供的接口完成数据处理与功能逻辑,是系统的“智能核心”。
3.2 主要功能模块
3.2.1 环境感知(Perception)
感知模块处理来自摄像头、毫米波雷达、激光雷达等传感器的数据,识别车道线、障碍物、交通标志与行人等目标,是车辆“看见世界”的基础。
3.2.2 数据融合(Sensor Fusion)
数据融合模块将来自不同传感器的检测结果综合处理,生成统一的环境模型,提升目标识别的稳定性与精度。
3.2.3 路径规划与决策(Planning & Decision)
规划与决策模块根据感知信息、车辆状态及道路约束生成最优行驶路径,并做出加减速、变道等策略决策,是系统的“大脑”。
3.2.4 控制执行(Control)
控制模块将规划结果转化为实际操作命令,如油门、刹车、转向等,使车辆按照预期轨迹运行,是系统的“手脚”。
3.3 功能逻辑与架构关系
应用层可理解为自动驾驶系统中回答三个关键问题的核心逻辑:
车在哪? —— 感知与定位确定自身位置与环境状态;
要去哪里? —— 决策模块制定目标路径;
如何去? —— 控制模块执行行驶动作。
通过这种分工,系统实现从环境理解到动作执行的完整闭环。
3.4 与底层软件的关系
底层软件与应用层软件共同构成ADAS系统的软件架构,各自承担不同但互补的职责。
底层软件侧重于硬件抽象与系统运行支持,负责管理传感器、执行器等硬件资源,提供稳定的运行环境和标准化接口。
应用层软件聚焦于功能算法与智能决策,基于底层接口实现感知、融合、规划与控制等核心驾驶功能。
4 总结
ADAS系统的软件架构采用自下而上的分层设计:
底层软件负责与硬件交互,提供稳定的运行环境。
应用层软件承担感知、融合、规划与控制等核心功能。
两者通过标准化接口实现解耦协作,既保证系统稳定可靠,又提升功能开发与部署的灵活性。
评论
留下你的阅读回音