
1 ADAS 架构概览
1.1 系统分层
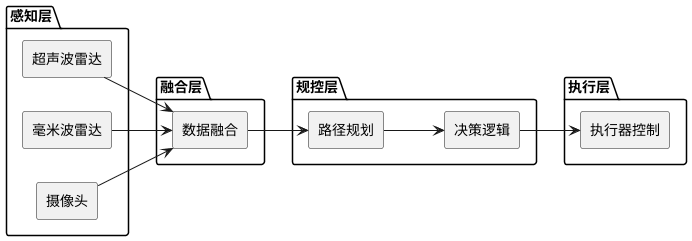
ADAS 系统通常分为四个层级:感知层、融合层、规控层和执行层,每一层独立运作,又紧密协作,形成闭环控制。
1.1.1 感知层
感知层是 ADAS 的信息采集基础,负责收集车辆周围环境数据。常用传感器包括:
摄像头(Camera):获取高分辨率图像,用于物体识别、车道检测与交通标志识别。
毫米波雷达(Radar):提供目标距离、速度和角度信息,抗天气干扰能力强。
超声波雷达(Ultrasonic):用于近距离障碍物检测,如泊车辅助。
1.1.2 融合层
融合层将来自不同传感器的数据进行处理与整合,提高环境理解的准确性和鲁棒性。
前融合(Early Fusion):直接对原始传感器数据进行融合,如点云与图像叠加。
中融合(Feature-level Fusion):在特征提取后进行融合,保留更有语义的环境信息。
后融合(Decision-level Fusion):在各传感器独立做出判断后,再融合决策结果,增强可靠性。
常用算法包括卡尔曼滤波、扩展卡尔曼滤波(EKF)、粒子滤波,以及多模态深度学习方法。
1.1.3 规控层
规控层负责对车辆运动进行规划与决策,连接感知结果与执行操作。
路径规划
全局规划:基于地图和导航数据生成最优行驶路线。
局部规划:根据实时感知信息进行避障、跟车及车道保持。
决策逻辑
通过状态机或行为树定义车辆动作模式。
风险评估模块负责判定安全边界,确保车辆在不同场景下行为可控。
1.1.4 执行层
执行层将规控层输出的指令转化为车辆运动:
执行器接口:转向、油门、制动信号。
控制算法:PID 控制和模型预测控制(MPC)常用于轨迹跟踪和速度控制,实现闭环精准控制。
执行层的关键在于信号的实时性和控制精度,直接决定车辆行为的安全与舒适性。
2 感知层详细解析
2.1 感知层概述
感知层是 ADAS 系统的“眼睛”,负责实时感知车辆周围环境信息,为融合与规控提供数据基础。
关键目标是 高精度、低延迟、强鲁棒性,以应对不同天气、光照和复杂交通场景。
2.2 主要传感器类型及原理
2.2.1 摄像头(Camera)
功能:车道识别、交通标志识别、物体检测与分类。
类型:单目、双目(立体)、全景/鱼眼摄像头。
关键参数:分辨率(HD、FHD)、帧率(30–60 fps)、视场角(FoV)。
工作原理:基于光学成像,通过像素特征和深度学习算法识别场景语义。
2.2.2 毫米波雷达(Radar)
功能:目标检测、距离测量、速度测量。
类型:单发射/多发射天线阵列、成像雷达(FMCW)。
关键参数:最大探测距离(50–250 m)、速度分辨率(0.1–0.5 m/s)、角分辨率(1–10°)。
工作原理:发射电磁波,接收目标反射波,利用 多普勒效应 计算速度,通过信号处理生成距离与角度信息。
2.2.3 超声波雷达(Ultrasonic Sensor)
功能:近距离障碍物探测,常用于低速场景如泊车辅助。
关键参数:探测距离(0.2–5 m)、分辨率(0.01–0.05 m)。
工作原理:发射高频声波,测量回波时间计算距离。
2.2.4 激光雷达(Lidar)
功能:用于高精度三维环境感知,可实现障碍物检测、距离测量、点云建图与目标轮廓识别,常用于自动驾驶和高阶辅助驾驶场景。
类型:机械式激光雷达、半固态激光雷达、固态激光雷达。
关键参数:探测距离(50–200 m 甚至更高)、角分辨率、点频、扫描线数(如 16 线、32 线、64 线、128 线)、视场角(FoV)。
工作原理:通过发射激光束并接收目标反射回波,测量激光往返时间或相位变化,计算目标距离与方位信息,生成周围环境的三维点云数据,从而实现对道路、车辆、行人及障碍物的精确感知
2.3 传感器性能指标与设计考量
探测距离:根据功能选择长距(毫米波雷达)或短距(超声波)。
分辨率:摄像头决定图像细节,雷达阵列决定角分辨率。
帧率/刷新率:确保动态场景跟踪及时性。
环境适应性:光照、雨雪、雾霾等对传感器性能的影响。
2.4 感知层关键技术点
目标检测与分类:深度学习算法(YOLO、SSD 等)在摄像头数据中实现语义理解。
多目标跟踪(MOT):结合雷达与摄像头,通过卡尔曼滤波、粒子滤波实现连续追踪。
传感器标定与同步:保证多传感器空间对齐和时间一致性,提升融合精度。
3 融合层技术实现
3.1 数据融合策略
融合层是感知层与规控层之间的桥梁,目标是提升环境感知的精度与鲁棒性。
前融合(Early Fusion):直接对原始传感器数据进行融合,例如将雷达点云映射到摄像头图像,实现空间对齐。优点是信息最完整,但计算量大,对传感器标定要求高。
中融合(Feature-level Fusion):在特征提取后进行融合,例如卷积神经网络提取的摄像头特征与雷达特征结合,实现语义增强。平衡信息丰富度与计算效率。
后融合(Decision-level Fusion):各传感器独立完成目标检测或跟踪后,再融合决策结果,实现冗余与可靠性提升。
3.2 融合算法
卡尔曼滤波(KF)与扩展卡尔曼滤波(EKF):适用于线性或弱非线性目标跟踪。
粒子滤波(PF):处理高度非线性和非高斯问题,如多目标动态环境下的跟踪。
深度学习多模态融合:通过神经网络学习不同传感器特征权重,实现语义增强、异常场景识别和环境理解。
4 规控层关键算法
4.1 路径规划
规控层是 ADAS 的“大脑”,根据融合感知信息规划安全可行路径。
全局规划:基于高精地图(HD Map)生成最优路线,考虑路网结构、交通规则和到达时间。
局部规划:实时避障、车道保持、跟车控制,同时兼顾舒适性与安全性。
4.2 决策逻辑
状态机与行为树:管理车辆行为,实现 ACC、LKA 等功能状态切换。
风险评估与安全约束:结合速度、距离、碰撞概率进行决策,保证车辆动作在安全边界内执行。
5 执行层与闭环控制
5.1 执行器接口
执行层将规控层决策转化为实际动作,通过执行器实现车辆控制。
控制信号:转向角、油门开度、制动压力。
控制器匹配策略:根据不同执行器特性匹配控制器参数,保证响应速度与精度。
5.2 控制算法
PID 控制:经典反馈控制,实现稳定的速度和转向控制。
模型预测控制(MPC):利用车辆动力学模型预测未来状态,优化轨迹跟踪与速度控制。
轨迹跟踪与速度控制:结合实时感知和规划路径,实现闭环精确控制。
6 ADAS 系统闭环与整体协同
ADAS 并不是单一算法或某个模块的堆叠,而是一个从环境感知到行为落实的闭环控制系统。系统的各层之间不仅要独立稳定,还要通过数据流、状态流与控制流进行协同。
这一闭环逻辑可以总结为:
感知 → 融合 → 规划 → 决策 → 执行 → 再反馈到感知。
系统协同要点:
感知层提供环境状态,但其不直接决定行为。
融合层负责在多源信息中提取稳定、可信的世界模型。
路径规划与决策是策略层,决定“该怎么走、是否该动作”。
执行层是真实车辆行为落地点,直接影响安全性与舒适性。
闭环形成后,任何一层的延迟或误差都可能被系统不断放大,因此实时性与鲁棒性是架构核心。
评论
留下你的阅读回音