
1 CAPL 概述
CAPL(CAN Application Programming Language)是由 Vector Informatik 开发的一种专用于汽车网络仿真与测试的脚本语言。CAPL 主要运行于 Vector 的网络分析与仿真工具(如 CANoe、CANalyzer)中,用于实现网络节点仿真、报文控制、信号处理及自动化测试逻辑。
1.1 CAPL 简介
CAPL 的语法风格类似于 C 语言,但其设计目标并非通用软件开发,而是针对车载通信网络的测试与验证场景进行专门优化。它与数据库文件(DBC、LDF、FIBEX 等)深度集成,能够直接操作网络中的报文(Message)与信号(Signal)。
从工程角度来看,CAPL 是一种面向事件驱动的测试脚本语言。
1.2 CAPL 设计目标
CAPL 的核心设计目标可以概括为以下几个方面:
1.2.1 网络节点仿真
在 ECU 尚未开发完成或无法参与联调时,可通过 CAPL 构建虚拟节点,实现:
报文周期发送
信号值动态修改
故障场景模拟
总线负载控制
这种方式可支持整车网络的早期联调与系统验证。
1.2.2 自动化测试实现
CAPL 可用于编写自动化测试逻辑,包括:
报文触发条件验证
信号边界值测试
协议一致性检查
故障恢复逻辑验证
结合 CANoe Test Feature Set(TFS),CAPL 可以实现结构化测试用例、测试报告生成及回归测试执行。
1.2.3 报文与信号控制
CAPL 与通信数据库绑定后,可直接操作:
CAN/LIN/FlexRay/Ethernet 报文
信号物理值与原始值
网络管理状态
诊断会话流程
这种能力使其成为网络层验证的重要工具。
2 CAPL 程序结构与执行
第一章介绍了 CAPL 的定位。本章回答一个更关键的问题:
CAPL 程序究竟是如何运行的?
很多工程师第一次编写 CAPL 时,会下意识寻找 main 函数 。但在 CAPL 中,这种概念并不存在。理解这一点,是写好 CAPL 的分水岭。
2.1 CAPL 的整体结构
一个标准 CAPL 脚本通常由以下几个部分构成:
头文件区(includes)
变量声明区(variables)
事件处理函数(event procedures)
用户自定义函数(user functions)
基本结构示例如下:
includes {
}
variables {
}
// 用户自定义函数
// 事件处理函数(on start / on message / on timer / testcase 等)从语法形式看,它类似 C 语言,但从执行方式看,它完全不同。
CAPL 的核心是:
事件驱动(Event-Driven Execution Model)
程序不会自上而下顺序执行。它始终处于等待状态,当某个事件发生时,才执行对应的代码块。
2.2 工程示例结构解析
以下结构在实际项目中非常常见:
CRC 算法函数
报文封装函数
主循环控制函数
void MainTest () {
for(;;) {
BCMPower_Off_Ign();
VehSpd();
if(@MemoryTest::TotalSwitch == 1) {
IVISetSts_Send();
}
testWaitForTimeout(50);
}
}从逻辑上看,它像一个典型的主循环。
但这里必须严谨说明:
CAPL 不会自动执行 MainTest()。
除非它被某个事件或测试框架调用,否则该函数永远不会运行。
2.3 CAPL 的真实入口
2.3.1 Simulation Node
在普通仿真节点中,必须通过事件触发:
on start {
MainTest();
}但需要注意,在仿真节点中,不推荐使用 for(;;) 死循环。
原因是:
CAPL 运行在单线程事件调度模型下
长时间阻塞会影响报文接收与其他事件响应
更推荐的方式是使用定时器驱动:
msTimer MainTimer;
on start {
setTimer(MainTimer, 50);
}
on timer MainTimer {
BCMPower_Off_Ign();
VehSpd();
setTimer(MainTimer, 50);
}这种方式更符合 CAPL 的设计思想。
2.3.2 Test Module
如果程序运行在 CANoe Module 中,则结构不同。
此时可以使用:
void MainTest() {
while(1) {
BCMPower_Off_Ign();
VehSpd();
testWaitForTimeout(50);
}
}在测试模块中,void MainTest() 才是执行入口。
此时使用 testWaitForTimeout() 是合理的,因为测试框架本身管理执行流程。
2.4 典型工程结构分层
结合实际项目,推荐采用如下结构分层:
2.4.1 算法工具函数
byte Crc_CalculateCRC8_1(){
}特点:
不依赖事件
可复用
不直接发送报文
这是纯逻辑层。
2.4.2 报文封装函数
void BCMPower_Off_Ign() {
int i = 0;
byte dataBuffer_1[10];
BCMPower.dlc = 8;
BCMPower.byte(0) = 0x02;
BCMPower.byte(1) = 0x00;
BCMPower.byte(2) = 0x00;
BCMPower.byte(3) = 0x00;
BCMPower.byte(4) = 0x00;
BCMPower.byte(5) = 0x00;
BCMPower.byte(6) = BCMPower_RC;
for(i = 0; i < 7; i++) {
dataBuffer_1[i] = BCMPower.byte(i);
}
BCMPower.byte(7) = Crc_CalculateCRC8_1(dataBuffer_1, 7,0x00);
output(BCMPower);
BCMPower_RC = (BCMPower_RC + 1) & 0x0F;
}职责包括:
信号打包
物理值转原始值
Rolling Counter 更新
CRC 计算
output() 发送
这属于通信封装层。
2.4.3 调度层
定时器驱动
msTimer MainTimer;
void MainTest() {
setTimer(MainTimer, 50);
testWaitForTimeout(100000);
}
on timer MainTimer {
BCMPower_Off_Ign();
VehSpd();
// 重新启动 50ms 周期
setTimer(MainTimer, 50);
}测试循环控制
void MainTest() {
while(1) {
BCMPower_Off_Ign();
VehSpd();
if(@MemoryTest::TotalSwitch == 1) {
IVISetSts_Send();
}
testWaitForTimeout(50);
}
}条件触发控制
if(@MemoryTest::TotalSwitch == 1) {
IVISetSts_Send();
}这一层决定报文何时发送。
2.5 CAPL 的执行本质
可以将 CAPL 抽象为:
一个事件监听器
一个调度器
多个回调函数
运行过程为:
仿真启动
执行 on start
等待事件
触发对应回调
返回等待状态
程序始终围绕等待 → 触发 → 执行 → 返回循环。
这与嵌入式系统中的中断模型非常相似。
2.6 关于死循环的工程建议
在 CAPL 中:
不推荐在 Simulation Node 中使用
for(;;)推荐使用定时器调度
避免长时间阻塞
控制单次执行时间
CAPL 并非实时操作系统,它是事件调度模型。阻塞代码会影响整体仿真精度。
3 Panel 与 CAPL 的绑定机制
在 CANoe Test Module 中,Panel 与 CAPL 的交互依赖于 System Variables(系统变量) 机制。
其基本流程包括三个步骤:
创建 System Variable
在 Panel 中绑定变量
在 CAPL 中通过
@命名空间::变量名访问
整个过程构成了 Panel 与 CAPL 之间的数据桥梁。
3.1 创建 System Variable
首先需要在 CANoe 导航栏中进行变量创建:

在 System Variables 窗口中:
新建 Namespace(例如:MemoryTest)
在该命名空间下创建变量
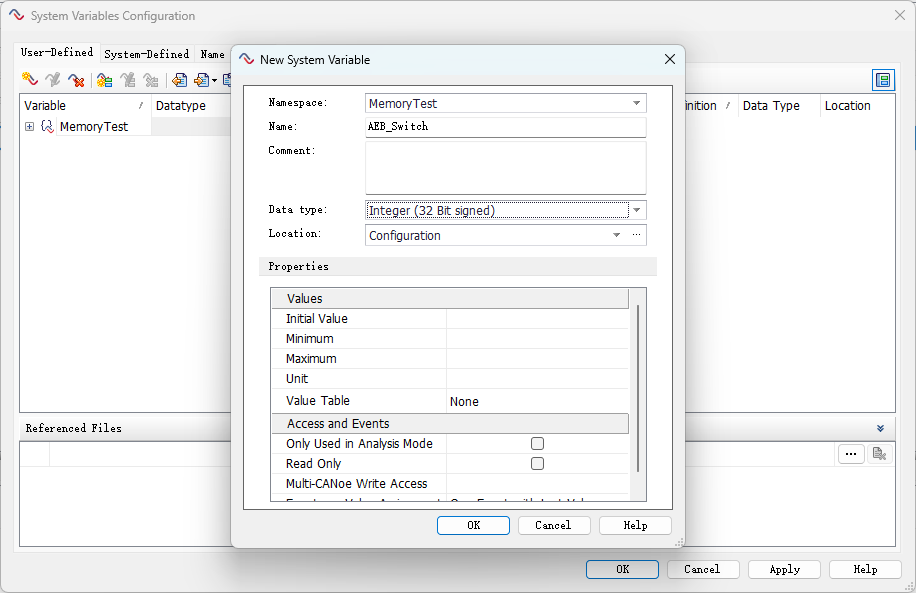
类型选择需要根据使用场景确定:
开关类 → int 或 boolean
数值类 → double 或 int
创建完成后,这些变量成为全局可访问变量。
3.2 Panel 组件绑定 System Variable
在创建 Panel 组件时:
插入控件(按钮 / 滑块 / 数值框等)
在控件属性中找到 Symbol 绑定选项
选择对应的 System Variable
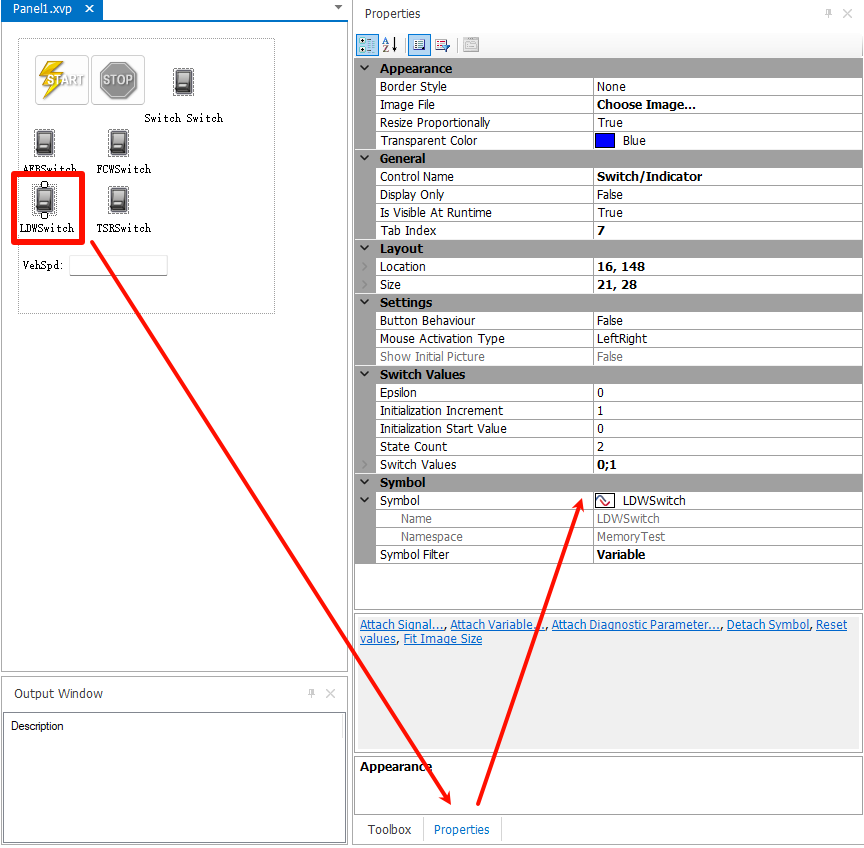
此时,当用户在 Panel 上操作控件时:
System Variable 的值会实时更新
Panel 并不直接调用 CAPL。
它只负责修改系统变量。
3.3 CAPL 中访问 System Variable
在 CAPL 中,可以通过以下语法访问变量:@Namespace::VariableName
physSpd = @MemoryTest::VehSpd;
if(@MemoryTest::TotalSwitch == 1) {
IVISetSts_Send();
}这种访问方式是:
直接读取当前变量值
不需要额外声明
支持读写操作
3.4 事件响应机制
CAPL 还支持监听变量变化:
on sysvar MemoryTest::TotalSwitch {
write("Switch changed");
}当变量发生变化时自动触发。
这种方式适用于:
即时响应场景
状态切换控制
日志记录
4 多周期报文调度架构设计
在实际项目中,一个 ECU 通常同时存在多个发送周期:
10ms 周期报文
20ms 周期报文
50ms 周期报文
100ms 周期报文
如果缺乏统一调度设计,代码很快会失控。因此需要构建一个清晰的多周期调度架构。
4.1 设计目标
多周期调度架构应满足:
周期清晰
易于扩展
易于维护
RC 更新节奏稳定
不影响测试框架执行
核心思想是:
统一时间基准,按倍数分发。
4.2 基础时间基准法
选择一个最小时间单位,例如 10ms 作为基础 Tick。
int gTick = 0;
void MainTest() {
while(1) {
gTick++;
/* 10ms 周期 */
Send_10ms();
/* 20ms 周期 */
if(gTick % 2 == 0) {
Send_20ms();
}
/* 50ms 周期 */
if(gTick % 5 == 0) {
Send_50ms();
}
/* 100ms 周期 */
if(gTick % 10 == 0) {
Send_100ms();
}
// 至少等待 10ms (并不保证绝对精确)
testWaitForTimeout(10);
}
}这里的关键点是:
所有周期都是 10ms 的整数倍
统一时间节拍
不需要多个定时器
这种方式非常稳定,适合大部分测试场景。
4.3 分层封装建议
建议按周期分组封装:
void Send_10ms() {
BCMPower_Off_Ign();
}
void Send_50ms() {
VehSpd();
}不要在主循环中写具体报文逻辑。主循环只负责调度。报文函数只负责组帧。
4.4 RC 与周期一致性
Rolling Counter 必须与发送周期严格匹配。
例如:
10ms 报文 RC 每 10ms +1
50ms 报文 RC 每 50ms +1
如果 RC 更新节奏与周期不同步:
对端 ECU 会认为报文异常
即使 CRC 正确也会丢弃
因此 RC 更新必须放在报文函数内部,而不是主调度中。
// 正确方式
void VehSpd() {
VehSpd.byte(6) = VehSpd_RC;
VehSpd_RC = (VehSpd_RC + 1) & 0x0F;
}
// 错误方式
VehSpd_RC++;
VehSpd();4.5 可扩展结构
当周期数量增多时,可采用表驱动思想维护一个周期配置表:
虽然 CAPL 不支持复杂数据结构,但逻辑上应按此思路组织代码。
5 Rolling Counter 与 CRC 的通用封装模式设计
Rolling Counter 和 CRC 在车载网络里属于:
报文完整性保护机制(Message Integrity Protection)
在 ADAS 系统里,它们直接影响功能安全与通信可靠性。
5.1 Rolling Counter 机制设计
Rolling Counter(滚动计数器)用于检测:
丢帧
重复帧
乱序帧
常见位宽:
4bit(0~15)
8bit(0~255)
不要把计数逻辑写死在报文函数里。应抽象为:
byte UpdateRollingCounter(byte current, byte max) {
current++;
if(current > max) {
current = 0;
}
return current;
}
// 调用
msg.RC = UpdateRollingCounter(msg.RC, 15);优势:
支持不同位宽
便于统一维护
可做异常注入测试
5.2 CRC 机制抽象设计
CRC(Cyclic Redundancy Check)用于检测比特级错误。
常见类型:
CRC8 SAE-J1850
CRC8 H2F
CRC16 CCITT
CRC 设计需要抽象三个维度:
算法类型
校验覆盖范围
初始值与多项式参数
建议设计统一接口:
byte CalculateCRC(byte data[], int length, int CRC_TYPE);其中 CRC_TYPE 定义为枚举。
enum CRC_TYPE {
CRC8_SAE_J1850 = 0,
CRC8_H2F = 1,
CRC16_CCITT = 2
};这样可以做到:
算法与报文解耦
支持多种平台切换
统一维护入口
5.3 完整性处理统一入口设计
成熟架构应分三层:
信号赋值层
完整性处理层
调度发送层
完整性处理应统一封装:
void ApplyIntegrity(Message &msg, IntegrityConfig cfg)
// 配置结构
struct IntegrityConfig {
byte rcMax;
int crcType;
int crcStart;
int crcLength;
};优势:
报文逻辑与算法完全分离
易于扩展
易于统一变更
支持错误注入测试
5.4 顺序规范
完整性处理顺序必须严格:
更新 Rolling Counter
清零 CRC 字段
计算 CRC
写入 CRC
顺序错误将导致系统校验失败。这是通信一致性问题,不是语法问题。
Rolling Counter 代表时间连续性。CRC 代表数据完整性。时间与正确性,是通信系统的两个基本维度。
5.5 示例
/*@!Encoding:936*/
includes {
}
variables {
// 定义 CRC 类型常量
const int CRC8_SAE_J1850 = 0;
// 定义全局 Tick 计数
int gTick = 0;
// 定义完整性配置结构
struct IntegrityConfig {
byte rcMax;
int crcType;
int crcStart;
int crcLength;
};
// 为报文定义完整性规则
IntegrityConfig VehSpdIntegrityCfg = {15, CRC8_SAE_J1850, 0, 7};
}
/* ================= Rolling Counter 统一接口 ================= */
/* 更新 Rolling Counter 并处理回绕 */
byte UpdateRollingCounter(byte current, byte max) {
if(current >= max) {
return 0;
}
else {
return current + 1;
}
}
/* ================= CRC 统一接口 ================= */
/* CRC8 SAE-J1850 算法实现 */
byte CRC8_SAE_J1850_Calc(byte data[], int length) {
byte crc = 0xFF;
byte poly = 0x1D;
int i;
int j;
for(i = 0; i < length; i++) {
crc ^= data[i];
for(j = 0; j < 8; j++) {
if(crc & 0x80) {
crc = (crc << 1) ^ poly;
}
else {
crc = (crc << 1);
}
}
}
return crc ^ 0xFF;
}
/* 统一 CRC 计算接口 */
byte CalculateCRC(byte data[], int length, int type) {
switch(type) {
case 0:
return CRC8_SAE_J1850_Calc(data, length);
default:
return 0;
}
}
/* ================= 完整性统一入口 ================= */
/* 将报文指定范围拷贝到 buffer */
void CopyMsgRange(message msg, byte buffer[], int start, int length) {
int i;
for(i = 0; i < length; i++) {
buffer[i] = msg.byte(start + i);
}
}
/* 对报文执行 RC + CRC 完整性处理 */
void ApplyIntegrity(message &msg, IntegrityConfig cfg) {
byte buffer[64];
// 更新 Rolling Counter
msg.byte(6) = UpdateRollingCounter(msg.byte(6), cfg.rcMax);
// 清零 CRC 字段
msg.byte(7) = 0x00;
// 复制 CRC 覆盖范围
CopyMsgRange(msg, buffer, cfg.crcStart, cfg.crcLength);
// 计算 CRC
msg.byte(7) = CalculateCRC(buffer, cfg.crcLength, cfg.crcType);
}
/* ================= 报文业务层 ================= */
/* 构造并发送 VehSpd 报文 */
void Send_VehSpd() {
int i;
// 设置 DLC
VehSpd.dlc = 8;
// 清零报文数据
for(i = 0; i < 8; i++) {
VehSpd.byte(i) = 0x00;
}
// 示例业务数据填充
VehSpd.byte(0) = 0x12;
VehSpd.byte(1) = 0x34;
// 执行完整性处理
ApplyIntegrity(VehSpd, VehSpdIntegrityCfg);
// 发送报文
output(VehSpd);
}
/* ================= 多周期调度示例 ================= */
/* 主测试用例 */
void MainTest() {
while(1) {
// Tick 递增
gTick++;
// 10ms 周期
Send_VehSpd();
// 50ms 周期
if(gTick % 5 == 0) {
Send_VehSpd();
}
// 等待 10ms
testWaitForTimeout(10);
}
}上述示例代码已经具备:
算法与报文解耦,CRC 算法在
CRC8_SAE_J1850_Calc()内部报文函数不关心多项式和初始值
规则可配置,每个报文只需要一个
IntegrityConfig
统一维护入口
CRC 修改 → 只改
CalculateCRC()RC 修改 → 只改
UpdateRollingCounter()覆盖范围修改 → 只改配置
报文函数极其干净
评论
留下你的阅读回音